宾夕法尼亚大学开发新算法 帮助机器人掌握物理接触技能
据外媒报道,宾夕法尼亚大学的工程师们开发出新算法,可以让机器人对复杂的物理接触做出实时反应,从而使自主机器人能够完成以前不可能完成的任务,比如控制滑动物体的运动。
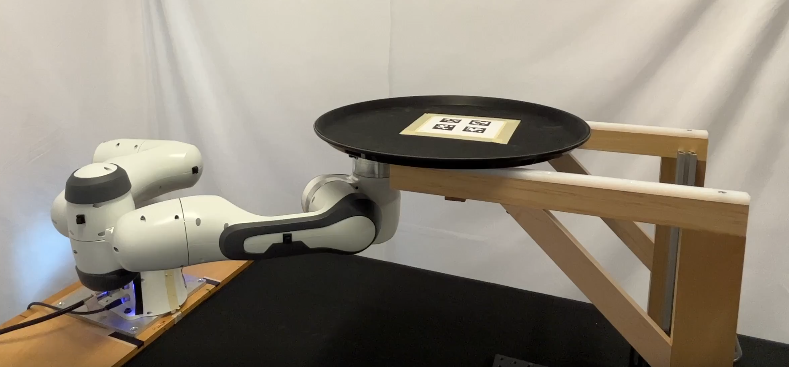
(图片来源:宾夕法尼亚大学)
该算法被称为共识互补控制(C3),可能成为未来机器人的重要组成部分,将大型语言模型(LLM)等人工智能工具输出的指令转化为适当的行动。机械工程和应用力学(MEAM)助理教授Michael Posa表示:“大型语言模型可能会说‘去切个洋葱’。这应该如何移动手臂来抓住洋葱,拿着刀以正确的方式切开它,必要时重新调整它的方向呢?”
机器人面临最大的挑战之一是控制,这个术语指的是机器人执行器的智能使用,而执行器是机器人移动或控制四肢的部件,比如电机或液压系统。控制机器人与其周围环境的物理接触既困难又必不可少。Posa表示:“这种低级和中级推理是让各种事物在物理世界中发挥作用的基础。”
自20世纪80年代以来,人工智能专家已经认识到,矛盾的是,人类习得的第一项技能(如何操纵物体并将其从一个地方移动到另一个地方,即使面对障碍物),却是最难教给机器人的,反之亦然。Posa表示:“机器人在开始接触物体之前表现得非常好。现在人工智能机器可以解决奥林匹克级数学问题,并在击败国际象棋专家。但它们的身体能力最多相当于两三岁的孩子。”
从本质上讲,这意味着机器人的每一次触摸互动(拿起一个物体,把它移到另一个地方)都必须经过精心设计。研究人员William Yang表示:“关键的挑战在于接触顺序。手放在哪儿?脚放在什么地方?”
当然,人类很少需要一再考虑如何与物体互动。在某种程度上,机器人面临的挑战是,像拿起杯子这样简单的事情,实际上涉及到许多不同的选择,比如正确的接近角度和适当的力度。Posa指出:“这些选择并非都与周围选项大为不同。但是,目前还没有算法允许机器人评估所有这些选择,并实时做出适当的决定。”
为了解决这个问题,研究人员设计了一种方法,帮助机器人“幻想(hallucinate)”与物体接触时可能出现的不同可能性。Posa表示:“通过想象触摸物体的好处,可以在算法中得到与这种互动相对应的梯度,然后应用一些基于梯度的算法,在解决这个问题的过程中,物理成分随着时间的推移逐渐变得越来越精确。这不再是只限于想象‘如果我触摸它会怎么样’,而是真的打算走出去触摸它。”
相关论文展示了C3如何使机器人能够实时控制滑动物体。Yang表示:“众所周知,滑动在机器人技术中是很难控制的。从数学上讲,这很难且必须依靠物体反馈。”但是,Yang利用C3展示了机械臂如何安全地操作托盘,类似于餐馆服务员使用的托盘。在实验录像中,Yang让机械臂拿起和放下托盘(包括带咖啡杯和不带咖啡杯),并靠墙旋转托盘。“以往研究只是想避免滑动,但该算法将滑动作为机器人考虑的一种可能性。”
未来,该团队希望使这一算法在不同的情况下更加稳健,例如当机器人处理物体的重量略高于或低于预期时,并将该项目扩展到目前C3无法处理的更开放的场景。Posa表示:“这是一个构建模块,可以从一个非常简单的规范开始,将这个部分转移到那里,然后提取机器人实现这一目标所需的电机扭矩。从一个非常非常复杂、混乱的世界,到对各种给定任务都很重要的关键对象或特征集,以及动态属性集,这是我们感兴趣的未解决问题。”
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- OPTIMA推出全新ORANGETOP QH6锂电池 可适应极端温度条件2024-11-14
- 西北大学开发新型触觉贴片 将复杂的触感传递到皮肤2024-11-14
- 特朗普胜选,汽车圈热议2024-11-14
- 2024年10月TOP30轿车销量投诉量对应点评2024-11-14
- 800V架构打造 全新宝马i3谍照首次曝光2024-11-14
- 最新减免购置税目录解析,环卫车成香饽饽/燃料电池重卡增多......2024-11-14
- 十月车市火了 汽车锂电板块热度不断走高2024-11-14
- 一句话点评10月纯电车:补贴政策,让入门电车卖爆了2024-11-14
- 5C超充,该怎么卷?2024-11-14
- 物流车下乡升温?远程/比亚迪/福田/江淮/飞碟想到一起了2024-11-14