德国研究人员开发软机器人短裤 帮助老年人和行动不便的人行走
据外媒报道,海德堡大学(Heidelberg University)研究人员推出新型辅助系统WalkON,可以帮助老年人和行动不便人士提高步行效率。该系统包括一条软机器人短裤,可以在人们行走时支撑臀部屈曲。相关论文发表在期刊《Nature Machine Intelligence》上。
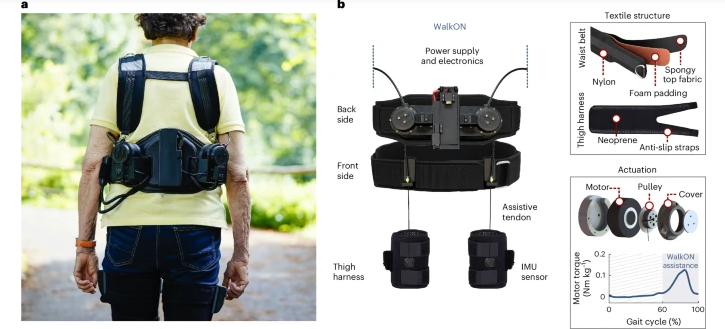
(图片来源:nature.com)
作为更广泛研究工作的一部分,该项目专注于为老年人开发数字技术和智能辅助系统。WalkOn短裤是在Lorenzo Masia的指导下由研究生开发的,Lorenzo Masia之前在海德堡大学任教,现在是慕尼黑工业大学(TUM)智能生物机器人系统教授。
海德堡大学博士生Enrica Tricomi表示:“最近发表论文的灵感源于,人们日益需要帮助老年人保持行动能力和独立性的解决方案。随着年龄的增长,人们行走起来越来越困难,需要消耗更多的体力,这会使一个人自由活动和享受生活的能力受限。我们认识到可穿戴辅助技术的潜力,开始着手设计一种可以在实际日常环境中解决这些挑战的设备,而不仅仅是在受控实验室环境中。”
研究人员希望开发一种轻便、柔软的机器人系统,以提高老年人在现实环境中的行走效率。值得一提的是,这种设备应该像衣服一样不引人注目,能够在不限制用户活动的情况下可靠地提高移动性。
此次开发的WalkON系统包括一条柔软轻便的机器人短裤,可以在人们行走时支撑双腿向前摆动所需的臀部运动。这些机器人短裤可以帮助体弱者和行动不便者行走,而不会显得笨重和碍事。Tricomi表示:“研究人员还希望在现实场景中测试设备,以评估其减少步行所需能量的能力,以及用户的使用感受。我们在户外小路上测试了WalkON,比如让年轻人爬山,老年人在平地上行走。结果表明,WalkON明显减少了行走所需的能量,从而让参与者更有效地移动,同时仍然感觉完全控制着自己的动作。”
针对年轻人和老年人进行的初步测试表明,WalkON短裤可明显减少使用者行走所需的能量。总体而言,这种系统可能是一种有价值的技术,有望改善人们在日常生活中的行动能力。Tricomi表示:“就实际应用而言,WalkON可以作为老年人或行动不便者的日常辅助设备。它有助于提高日常活动中的步行效率,比如在公园散步、购物,甚至是远足等体力要求更高的任务。WalkON有助于节省能量以提高人们的耐久力,从而让用户保持更活跃的状态和独立性,保持更高的生活质量。”
WalkON系统的最大优点在于,它可以提高移动性,而不给使用者带来任何不适感,这将极大地促进其广泛采用。现在,研究人员计划基于现有研究成果进行深入测试,旨在评估该系统在更具挑战性情况下的表现。
由Masia教授领导的研究团队已从海德堡迁移至慕尼黑工业大学(TUM)。目前,研究人员准备将若干WalkON设备分发给德国的老年病学中心(Geriatronics Center),老年人在附近的山上散步或上下楼梯时可以测试这些设备,从而评估该系统在更广泛的环境和移动任务中的性能。
与此同时,研究人员还在测试不同版本的机器人短裤,旨在支持体弱者的其他动作,例如从坐转换成站(sit-to-stand),这项工作是与海德堡Bethanien诊所合作进行的。这些额外试验旨在扩大WalkON的应用范围,以帮助解决更广泛的行动障碍,进一步增强其改善身体能力有限者的日常生活的潜力。
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- OPTIMA推出全新ORANGETOP QH6锂电池 可适应极端温度条件2024-11-14
- 西北大学开发新型触觉贴片 将复杂的触感传递到皮肤2024-11-14
- 特朗普胜选,汽车圈热议2024-11-14
- 2024年10月TOP30轿车销量投诉量对应点评2024-11-14
- 800V架构打造 全新宝马i3谍照首次曝光2024-11-14
- 最新减免购置税目录解析,环卫车成香饽饽/燃料电池重卡增多......2024-11-14
- 十月车市火了 汽车锂电板块热度不断走高2024-11-14
- 一句话点评10月纯电车:补贴政策,让入门电车卖爆了2024-11-14
- 5C超充,该怎么卷?2024-11-14
- 物流车下乡升温?远程/比亚迪/福田/江淮/飞碟想到一起了2024-11-14