康奈尔大学发明最小步行机器人 可以进行微尺度测量
据外媒报道,康奈尔大学(Cornell University)物理学和工程学的研究人员创造出迄今为止最小的行走机器人,小到可以与可见光波互动,同时仍能独立移动,这样它就可以移动到特定位置(例如组织样本中),拍摄图像并测量人体一些最小结构范围内的力。
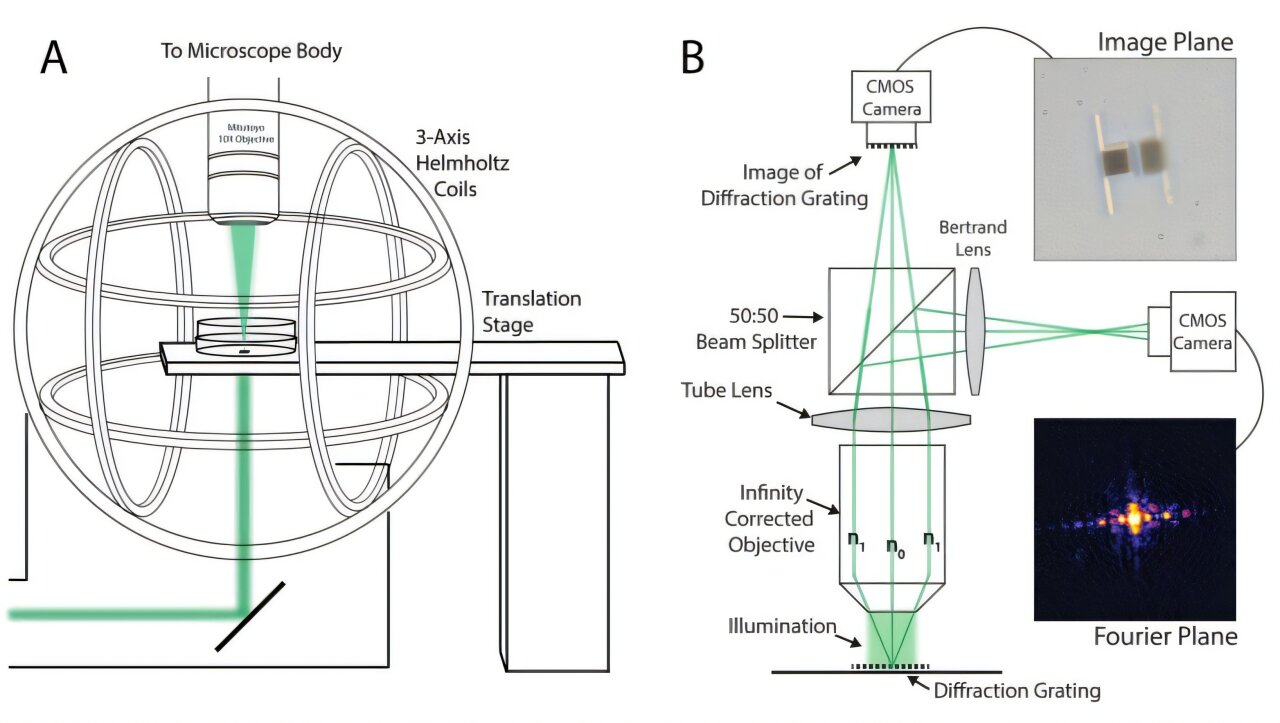
图片来源:期刊《Science》
“足够小的行走机器人可以有效地与光互动和塑造光线,它可以直接将显微镜的镜头放入微观世界,”该团队的负责人Paul McEuen说。“它可以进行普通显微镜无法做到的近距离成像。”相关研究论文《Magnetically Programmed Diffractive Robotics》发表于期刊《Science》,McEuen为通讯作者。
新型衍射机器人(diffractive robots)“将打破这一纪录”,该研究的共同作者、物理学教授Itai Cohen表示。“这些机器人只有5微米到2微米大小。它们非常小。我们可以通过控制驱动机器人运动的磁场让它们做任何我们想做的事情。”
衍射机器人技术首次将不受束缚的机器人与依赖于可见光衍射(光波穿过开口或绕过某物时发生弯曲)的成像技术连接起来。成像技术需要开口大小与光的波长相当。
为了使光学器件正常工作,机器人必须具有这种尺寸,并且为了使机器人能够到达要成像的目标,它们必须能够自行移动。康奈尔团队已经实现了这两个目标。这些机器人由磁铁控制,产生挤压动作,可以在固体表面上缓慢前进。它们还可以用同样的动作在液体中“游泳”。
研究人员表示,机动性、灵活性和亚衍射光学技术的结合在机器人领域取得了重大进展。“我对微型机器人和微光学的这种融合感到非常兴奋,”论文合著者、康奈尔大学工程学院电气和计算机工程副教授Francesco Monticone说道。
“机器人的微型化终于达到了这样的程度,这些驱动机械系统可以与光相互作用,并主动塑造波长仅为几波长的光——比一米小一百万倍。”
为了以这种规模磁力驱动机器人,该团队在机器人身上设计了数百个纳米级磁铁,这些磁铁的材料体积相同,但形状不同——长而细,或短而粗。Cohen说,这个想法源自复旦大学物理学家崔继斋。
Cohen表示:“细长的机器人需要较大的磁场才能将它们从指向一个方向翻转到指向另一个方向,而短粗的机器人则需要较小的磁场。这意味着你可以施加一个大磁场让它们全部对齐,但如果你施加较小的磁场,你只能翻转短粗的机器人。”
康奈尔大学的科学家将这一原理与康奈尔大学纳米科学与技术设施(Nanoscale Science and Technology Facility)发明的超薄薄膜相结合,制造出了机器人。
光学工程面临的主要挑战之一是找出最适合该特定平台的三项任务(调节光线、聚焦和超分辨率成像)的方法,因为“不同的方法有不同的性能权衡,这取决于微型机器人如何移动和改变形状,”Monticone表示。
Cohen表示,能够机械地移动衍射元件以增强成像是有好处的。机器人本身可以用作衍射分级,也可以添加衍射透镜。这样,机器人就可以充当从上往下看的显微镜镜头的局部延伸。
机器人使用相同的磁力驱动夹紧运动来测量力,这种运动使它们能够行走并推动结构。“这些机器人是非常柔顺的弹簧。因此,当有东西推它们时,机器人可以挤压,” Cohen表示。“这会改变衍射图案,我们可以很好地测量它。”
研究人员表示,力测量和光学能力可以应用于基础研究,例如探索DNA结构。或者它们可能被部署在临床环境中。“展望未来,我可以想象成群的衍射微型机器人在样本表面行走时执行超分辨率显微镜和其他传感任务,”Monticone表示。“我认为,我们真的只是触及了这种将机器人和光学工程在微观尺度上结合起来的新模式的可能性的表面。”
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- 康奈尔大学发明最小步行机器人 可以进行微尺度测量2024-12-04
- 特斯拉Cybertruck将停产三天2024-12-04
- 零跑C11累计销量突破20万台2024-12-04
- 宝马申请腕式触摸屏装置专利 以提高安全性2024-12-04
- 新专利申请:通用汽车开发自适应弹簧 用于悬架系统2024-12-04
- cba 季后赛什么时候开打呢,cba季后赛什么时候开打20202024-12-04
- 纳什nba多高,纳什身高体重臂展2024-12-04
- 奥运会乒乓球比赛有哪些项目,奥运会乒乓球比赛哪些项目参加2024-12-04
- 98年世界杯克罗地亚对名单,98年世界杯克罗地亚战绩?2024-12-04
- 欧洲杯小组赛怎么分的组,欧洲杯小组赛出现规则2024-12-04