中科院发明点云数据方法 增强自动驾驶汽车的小物体检测
三维物体检测对于自动驾驶汽车至关重要。它利用激光雷达生成的点云数据帮助自动驾驶汽车识别周围的物体。这项技术对于自动驾驶的安全性和效率至关重要。
据外媒报道,中国科学院合肥物质科学研究院(Hefei Institutes of Physical Science of the Chinese Academy of Sciences)的一个研究小组提出一种基于注意力机制和数据增强的点云三维物体检测方法。
图片来源:期刊《IEEE Transactions on Intelligent Transportation Systems》
“它可以帮助自动驾驶汽车更好地检测小物体,”领导该团队的王智灵教授表示。相关研究成果发表在期刊《IEEE Transactions on Intelligent Transportation Systems》。
传统的物体检测方法通常将稀疏、无序的点云数据转换为伪图像,以提取有序信息。然而,这种转换往往会丢失关键特征,导致检测精度下降,尤其是在检测较小物体时。
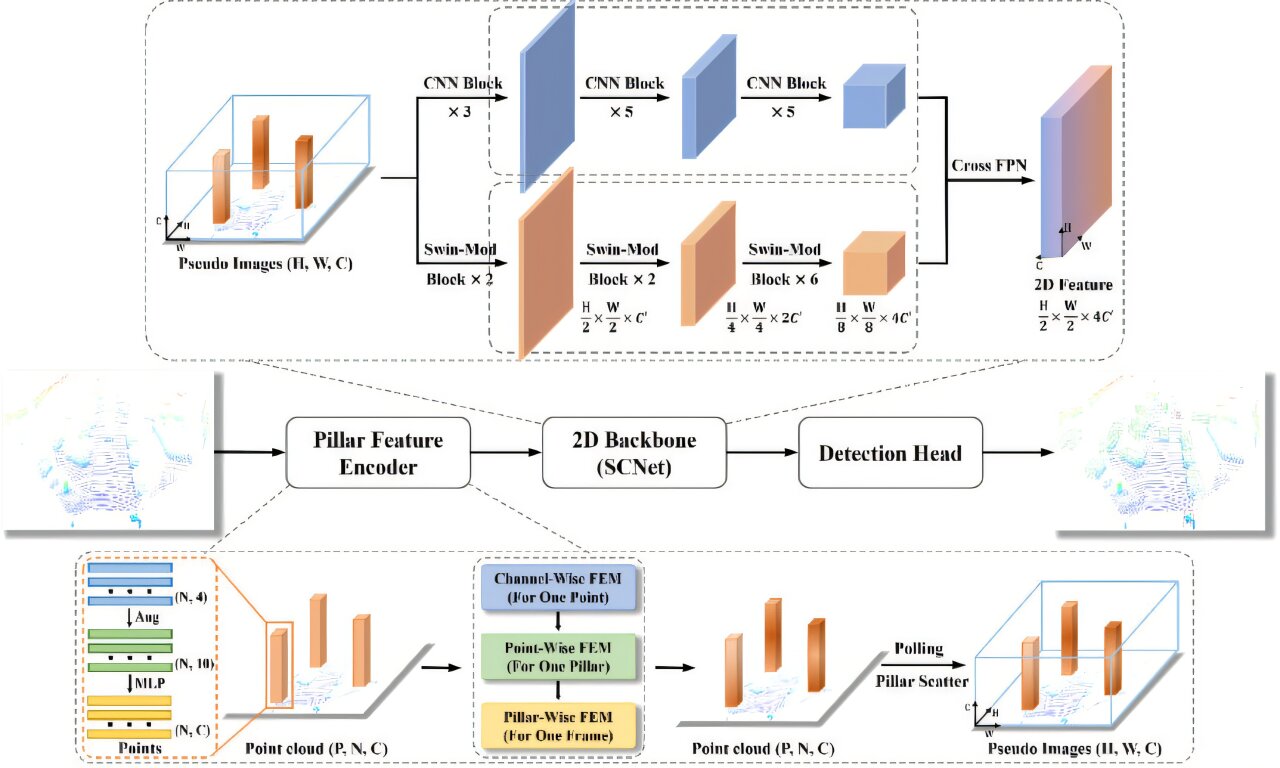
在这项研究中,研究人员引入了一种新的3D物体检测方法SCNet3D。该方法侧重于通过处理特征和数据来改善特征增强、保留信息和检测小物体。
通过这种方法,研究人员使用了一个特征增强模块,该模块应用注意力机制来收集三维空间中的重要特征,从局部到全局逐步改善3D特征。
此外,新方法采用了STMod-Convolution Network(SCNet),有两个用于特征提取的通道。一个通道处理基本特征,而另一个通道则通过结合鸟瞰伪图像的信息来处理更复杂、更高级的特征。
该研究还提出了一种形状和距离感知数据增强(Shape and Distance Aware Data Augmentation)方法,该方法在训练期间向点云添加有用的样本。
测试证明,即使在干扰多的复杂环境中,该方法也能有效检测小物体。这使其成为自动驾驶领域颇具前景的工具。
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- 中科院发明点云数据方法 增强自动驾驶汽车的小物体检测2024-12-06
- 湖人进季后赛了吗2023,湖人进季后赛了吗2023—242024-12-06
- 1314年热火vs雷霆,2012热火对雷霆2024-12-06
- lnba赛程,lnba赛事2024-12-06
- 勇士车副油箱怎么切换,勇士bj2022jlc主副油箱切换2024-12-06
- 哪个联赛欧冠冠军最多,那个联赛获得欧冠冠军最多2024-12-06
- 林书豪nba生涯总得分历史排名,林书豪nba最好数据2024-12-06
- 2011世界足球联赛排名,2011年世界杯足球2024-12-06
- 历届奥运会男子冰球冠军,历届奥运会男子冰球冠军是谁2024-12-06
- nba各球队球员名单最新,nba各球队球员名单大全2024-12-06