受蝠鲼启发 美国研究人员改进软体机器人设计并打破速度纪录
据外媒报道,北卡罗来纳州立大学(North Carolina State University)等机构的研究团队打破他们以往创建的最快游泳软体机器人纪录。研究人员从蝠鲼身上汲取灵感,从而提高其控制机器人在水中运动的能力。
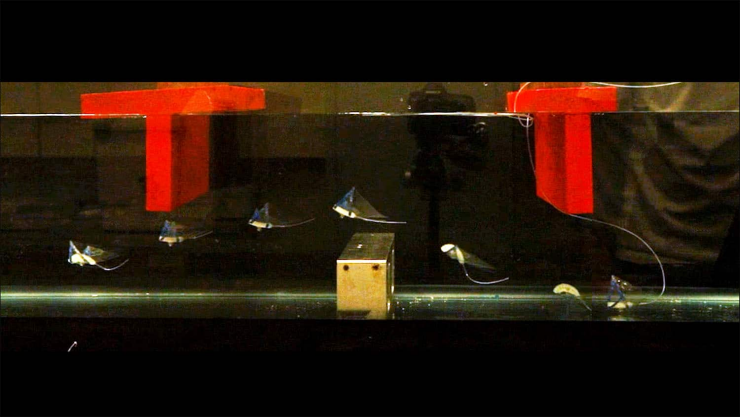
(图片来源:北卡罗来纳州立大学)
北卡罗来纳州立大学机械与航空航天工程副教授Jie Yin表示:“两年前,我们展示了一款水上软体机器人,其平均游动速度可达每秒3.74个身体长度。通过对该设计进行改进,新型软体机器人更加节能,可达到每秒6.8个身体长度的速度。此外,之前的模型只能在水面上游泳,而新型机器人能够在整个水柱中上下游动。”
这种软体机器人具有与蝠鲼相似的鳍状物,由一种在鳍张开时很稳定的材料制成。这些鳍片连接到灵活的硅胶体上,胶体内包含一个可以泵送充满空气的腔室。给气室充气会使鳍片弯曲,类似于蝠鲼拍打鱼鳍时的下冲行程。当空气从气室中排出时,鳍片会自发弹回其初始位置。北卡罗来纳州立大学博士生Haitao Qing表示:“将空气泵入腔室会将能量引入系统。如果要使鳍片恢复到稳定状态,释放空气也会释放鳍片中的能量。这意味着只需要一个执行器即可为机器人提供动力,从而实现更快速的驱动过程。”
研究人员探讨蝠鲼的流体动力学,对于控制软体机器人的垂直运动也发挥了关键作用。弗吉尼亚大学(University of Virginia)博士生Jiacheng Guo表示:“我们观察了蝠鲼的游泳动作,并能够模仿这种行为,以控制机器人是朝水面游动、向下游动,还是保持其在水柱中的位置。蝠鲼游泳时会产生两股水流,从而推动它们向前。蝠鲼通过改变游泳动作来改变其轨迹。我们采用类似技术来控制游泳机器人的垂直运动,并仍在探索能够精细控制横向运动的技术。”
加州大学河滨分校(University of California, Riverside)机械工程助理教授Yuanhang Zhu表示:“模拟和实验表明,这种机器人产生的向下喷射比上升射流更强大。如果机器人快速拍打鳍片,它就会上升。但是,如果降低驱动频率,机器人就可以在拍打鳍片的间隙略微下沉,因此它可以向下俯冲或在同一深度游泳。”
Qing表示:“另一发挥作用的因素是,研究人员利用压缩空气来为机器人提供动力。这具有重要意义,因为当机器人的鳍片静止时,气室是空的,从而降低机器人的浮力。当机器人缓慢拍打鳍片时,鳍片大多处于静止状态。换句话说,机器人拍打鳍片的速度越快,气室处于充满状态的时间就越长,从而使机器人的浮力更大。”
研究人员通过两种不同的方式展示了这种软体机器人的功能。首先,一次迭代机器人能够穿越在水箱表面和底部排列的一系列障碍物。其次,研究人员证明该无缆机器人(untethered robot)能够在水面上拖运有效载荷,包括其自身的空气和电源。
Yin表示:“这是一个高度工程化的设计,但基本概念相当简单。只需单个驱动输入,这种机器人就可以在复杂的垂直环境中导航。现在,研究人员致力于改进横向运动,并探索其他驱动模式,这将大大增强该系统的功能。我们希望保留优雅简洁的设计并实现这一点。”
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- 受蝠鲼启发 美国研究人员改进软体机器人设计并打破速度纪录2024-12-11
- 英国研究人员首次研制出碳-14钻石电池 潜在使用寿命可达数千年2024-12-11
- 东芝推出全新电池回收工艺 可将碳足迹减少达85%2024-12-11
- 【国际快讯】日产任命中国区负责人;通用退出无人驾驶出租车业务;Stellantis和宁德时代将合建电池厂2024-12-11
- 40年前,上汽大众相信自己会卖出2800万辆车吗?2024-12-11
- 统统围剿失败!能够打败Model Y的只有小米YU7?2024-12-11
- 国外火爆国内稀烂,卖车全靠换标?周钘以“微博”之力救名爵2024-12-11
- 得A级轿车,不再得天下2024-12-11
- 你说,会有国企收购哪吒吗?2024-12-11
- 11月车市增长16.5%,今年全年将再超2200万辆2024-12-11