康斯坦茨大学开发出新方法 可解决微型机器人协作和懒惰代理问题
想象一下,一群人一起搬运一件沉重的家具。每个人的努力都很重要,但如何确保每个人都能发挥自己的作用?这种公平分配负载的挑战不仅是人类团队合作的关键问题,也是协调机器人群的关键问题。
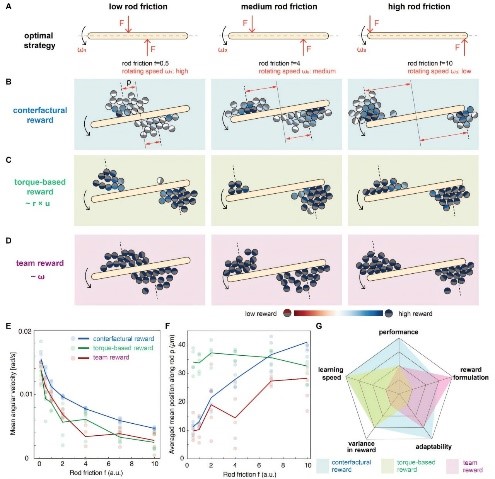
图片来源:University of Konstanz
在集体任务中,团队的成功取决于每个成员的贡献。然而,在集体环境中识别和奖励个人的努力绝非易事。当缩小到微米级别时,这一挑战变得更加艰巨,因为成群的微型机器人必须协同工作才能完成复杂的任务。
据外媒报道,由德国康斯坦茨大学(University of Konstanz)Clemens Bechinger领导的研究团队在解决这一问题方面取得重大进展,相关研究成果发表在期刊《Science Robotics》。这项研究的重点是微型机器人群(由激光点驱动的微型机器人),以及为每个机器人在团队任务中的作用分配功劳的困难。如果没有公平的系统,一些机器人可能会懈怠,而其他机器人则会承担重担,从而影响群体的整体性能。
为了解决这个问题,研究人员采用了一种机器学习算法和一种特殊的方法来估算每个微型机器人的贡献。这种方法确保每个机器人的作用都得到认可和优化,从而避免可能困扰集体任务的“懒惰代理问题(lazy agent problem)”。
“由于在如此小的尺度上存在不可预测性,因此这项研究极具挑战性。但是,通过使用反事实奖励,我们能够精确控制每个微型机器人的行为,并确保整个群体有效地协同工作,”进行这些实验的博士研究员Veit Lorenz Heuthe说道。这些“反事实奖励”为每个微型机器人所做的贡献提供了奖励,从而为群体提供了指标,以学习如何更好地自行分配力量。
该研究团队负责人Bechinger表示:“我们的研究结果表明,即使在一群微型机器人中,识别和优化个体的贡献对于实现最佳结果也是至关重要的。这种方法不仅提高了微型机器人群的效率,还为改善所有集体系统的团队合作提供了见解。”
这项研究为微型机器人群在医学和环境监测等领域的应用开辟了新的可能性,在这些领域,精确的控制和协调至关重要。
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- 康斯坦茨大学开发出新方法 可解决微型机器人协作和懒惰代理问题2024-12-24
- 福特汽车申请新专利 或将配备可展开式设备支架2024-12-24
- 大陆集团推出新显示概念Emotional Cockpit 将精致设计与先进显示技术相结合2024-12-24
- CES 2025:Seyond将展示高保真激光雷达解决方案2024-12-24
- Ansys与索尼半导体合作 推进基于场景的自动驾驶汽车感知测试2024-12-24
- 马刺队史冠军数,马刺队史首冠2024-12-24
- nba现役三分最准的中锋,现役nba中锋三分射手有哪些2024-12-24
- 费内巴切vs拜仁慕尼黑篮球,费内巴切拜仁慕尼黑篮球比分2024-12-24
- 女篮世界杯赛程公布 中国队将迎战美国 北京时间5月,女篮世界杯20222024-12-24
- 崔晓龙是哪里人,崔晓明简介2024-12-24