研究人员开发出新运动预测框架 可以提供更安全、更智能的自动驾驶汽车
据外媒报道,自动驾驶汽车预计将于2026年在英国上路,萨里大学(University of Surrey)和中国复旦大学开发出一种新型运动预测框架,有望使自动驾驶汽车更安全、更智能。
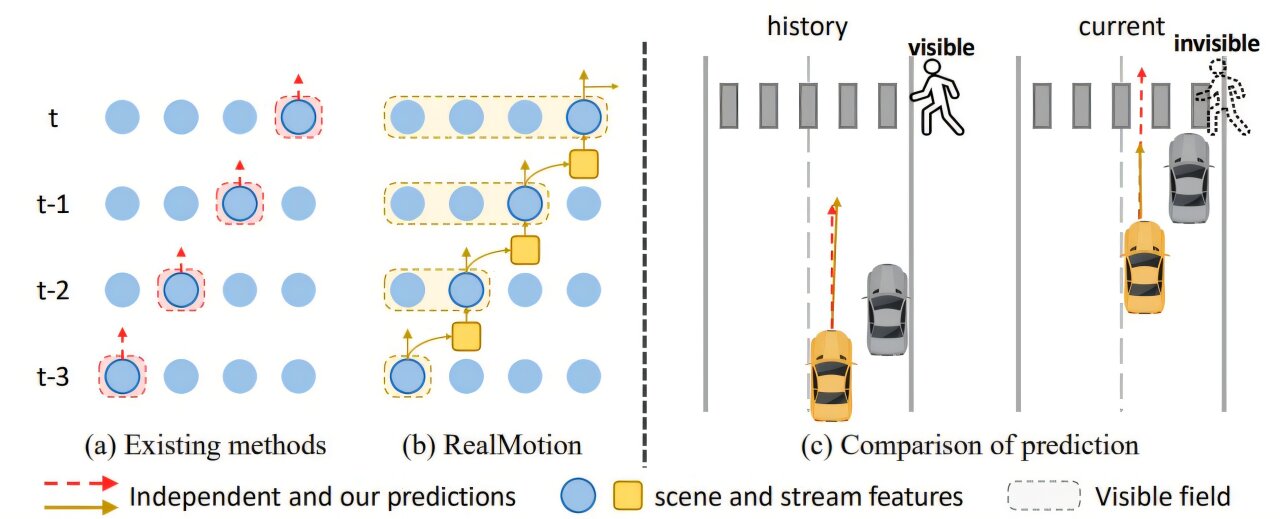
图片来源:萨里大学
研究人员结合专业知识创建出RealMotion——一种新颖的训练系统,可将历史和实时场景数据与背景和基于时间的信息无缝集成,为更高效、更可靠的自动驾驶汽车技术铺平道路。相关研究论文发表在arXiv预印本服务器上。
萨里大学视觉、语音和信号处理中心及以人为本人工智能研究所高级讲师、这项研究的合著者Xiatian Zhu博士表示:“无人驾驶汽车不再是一个未来的梦想。机器人出租车已经在美国和中国的部分地区投入运营,自动驾驶汽车预计最早明年就会在英国的道路上行驶。然而,每个人心中真正的问题是:它们有多安全?虽然人工智能的运作方式与人类驾驶员不同,但仍有挑战需要克服。这就是我们开发RealMotion的原因——不仅为算法配备实时数据,还使其能够整合时空的历史背景,从而做出更准确、更可靠的决策,实现更安全的自主导航。”
现有的运动预测方法通常独立处理每个驾驶场景,忽略了连续驾驶场景中过去和现在环境的相互关联性。这种限制阻碍了准确预测周围车辆、行人和其他代理在不断变化的环境中的行为的能力。
相比之下,RealMotion可以更清楚地了解不同的驾驶场景。整合过去和现在的数据可以增强对未来运动的预测,解决预测多个代理运动的固有复杂性。
使用自动驾驶研究领域的领先基准Argoverse数据集进行的大量实验凸显了RealMotion的准确性和性能。与其他AI模型相比,该框架在最终位移误差(FDE)(即预测的最终目的地与真实的最终目的地之间的距离)方面实现了8.60%的改善。它还展示了计算延迟的显著减少,使其非常适合实时应用。
萨里以人为本的人工智能研究所所长Adrian Hilton教授表示:“随着自动驾驶汽车即将在英国上路,确保人们的安全至关重要。朱Zhu博士及其团队开发的RealMotion为现有方法提供了重大进展。通过让自动驾驶汽车实时感知周围环境,并利用历史背景做出明智的决策,RealMotion为我们的道路更安全、更智能的导航铺平了道路。”
虽然研究人员遇到了一些限制,但该团队计划继续研究,以进一步提高RealMotion的能力并克服各项挑战。该框架有可能在塑造下一代自动驾驶汽车方面发挥关键作用,确保未来导航系统更安全、更智能。
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- 研究人员开发出新运动预测框架 可以提供更安全、更智能的自动驾驶汽车2025-01-26
- 研究人员发明新方法 通过粒子吞噬打印制造软电子器件2025-01-26
- 成大半导体学院团队研发新型光学仿生组件 为近感测发展辟新局2025-01-26
- 美国大学研发新软件框架让地图实时更新 以推动自动驾驶汽车技术发展2025-01-26
- 小米汽车招募万人体验团,测试端到端功能2025-01-26
- 特朗普政府将审查美国自动紧急制动规定2025-01-26
- 保时捷工程公司利用AI技术识别极端交通状况 以改进ADAS性能2025-01-26
- 施耐德电气推出EV充电解决方案 可加速EV普及2025-01-26
- 日产将根据政策调整在美国的电动汽车生产计划2025-01-26
- Rekor Systems与SoundHound AI合作 利用语音与对话AI技术革新应急车辆2025-01-26