哈佛开发微型类弹尾虫跳跃机器人 弹跳距离可达自身长度的23倍
弹尾虫经常在落叶和花园土壤中爬行,这种小虫子是专业的跳高运动员。据外媒报道,受这些跳跃的六足动物启发,哈佛大学工程与应用科学院(Harvard John A. Paulson School of Engineering and Applied Sciences,SEAS)的机器人专家制作了一种可以行走的跳跃机器人,从而突破小型机器人的极限。
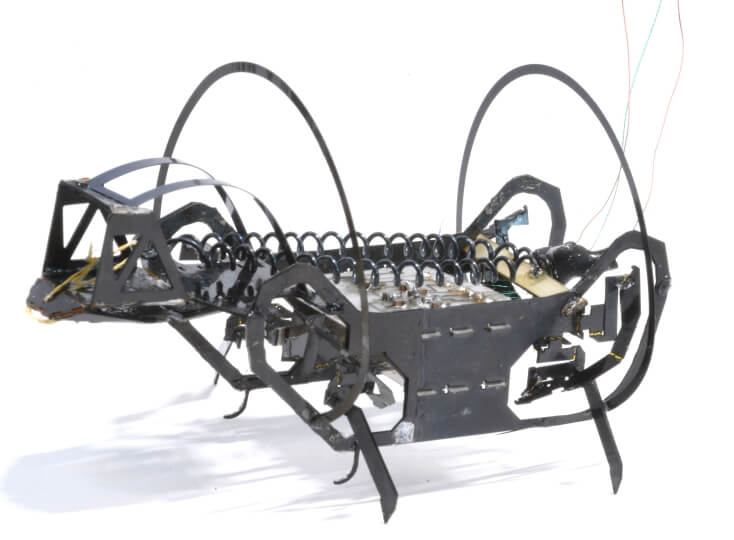
(图片来源:seas.harvard.edu)
这项研究展示了微型机器人的未来,它们能够灵活地在狭小的空间中爬行,迅速穿过危险地面,并在无须人类干预的情况下感知环境。
这种新机器人是在SEAS工程与应用科学系Harry Lewis和Marlyn McGrath教授Robert J. Wood的实验室中发明的。它是哈佛移动微型机器人(HAMR)的改良版,HAMR平台最初以灵巧、难以杀死的蟑螂为原型。
现在,HAMR配备了一个机器人叉骨,这种叉状的类似尾巴的附肢藏在弹尾虫的身体下方,可以将其推离地面并送入空中。Wood表示:“以弹尾虫作为灵感来源非常有趣,因为它们跨越了进化尺度,在空间和时间上都是普遍存在的。它们拥有一种独特的机制,可以快速接触地面,就像快速出拳一样,以传递动量并开始跳跃。”
为了实现升空,该机器人利用闩锁介导弹簧驱动机制(latch-mediated spring actuation),其中势能存储在弹性元件(即叉骨)中,可以在毫秒内像弹射器一样释放。这种物理现象在自然界中屡见不鲜,不仅仅存在于弹尾虫中,从变色龙的弹射舌头到螳螂虾的捕食附肢也很常见。
此前,Wood的团队受螳螂虾启发曾创造了一款冲击机器人(punching robot)。Wood表示:“探索使用类似的机制,并结合关于弹尾虫跳跃的见解,以用于小型跳跃机器人,这似乎是自然而然的事情。”
前SEAS研究员Francisco Ramirez Serrano表示:“弹尾虫的尾叉优雅而简单,仅由两个或三个相连的单元组成。我想最初正是这种简洁性吸引我去探索此类解决方案。”
利用Wood实验室开创的精简微加工流程,该团队开发了这种手掌大小、像纸夹一样轻的机器人,它能够走路、跳跃、爬行、攻击,甚至捡起物体。
该机器人的跳跃距离和高度与体长之比在现有机器人中名列前茅。它的最佳表现是1.4米,是其身长的23倍。相比之下,类似机器人可以跳两倍远,但其重量是哈佛机器人的20倍。Serrano表示:“现有微型机器人可以在平坦的地形上移动和跳跃,但并不具备可与该平台相媲美的敏捷性。”
该团队在机器人设计中融合详细的计算机仿真,以帮助它每次都能实现最佳着陆,精确地控制其联动长度、储存能量,以及机器人起跳前的姿态。
令该团队兴奋的是,将各种运动能力整合至一个轻量化机器人中,未来这样的机器人可能穿越人类不能或不应该穿越的地方。Wood表示:“步行是一种精确高效的运动方式,但在穿越障碍物方面存在局限性。通过跳跃的方式,可以越过障碍物,但控制性较弱。将这两种模式结合起来,可以有效地在自然和非结构化环境中导航。”
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- 哈佛开发微型类弹尾虫跳跃机器人 弹跳距离可达自身长度的23倍2025-03-02
- 盖世周报 | 奔驰中国裁员15%;奇瑞向港交所递交上市申请2025-03-02
- 全款一口价17.69万元起,“智能油车扛把子”全新探岳L 震撼上市2025-03-02
- 凯迪拉克全新CT5上市,限时一口价21.59万元起2025-03-01
- 蔚来公司2月交付新车13,192台,同比增长62.2%2025-03-01
- 11.99万元起,艾瑞泽8 PRO正式开启预售2025-03-01
- Seeds | 臻驱科技完成E轮融资,完善海内外业务布局2025-03-01
- 新产品新技术 东风日产加速向新能源第一梯队转型2025-03-01
- 7分钟补能400公里 实拍东风日产N72025-03-01
- 插混升级,启辰全新大V DD-i虎鲸限时12.59万起2025-03-01