横滨国立大学开发微型“犀牛甲虫”机器人 可在极端条件下进行微尺度操作
据外媒报道,横滨国立大学(YOKOHAMA National University)研究人员设计出一款微型、轻便、无线的机器人,可在某些极端条件下以超高精度独立工作。设计师们称该机器人为“完整约束甲虫3”(或HB-3),其灵感来自犀牛甲虫的运动和解剖结构。该机器人结合压电致动器与自主技术,能够完成以前机器人无法完成的微尺度操作任务。
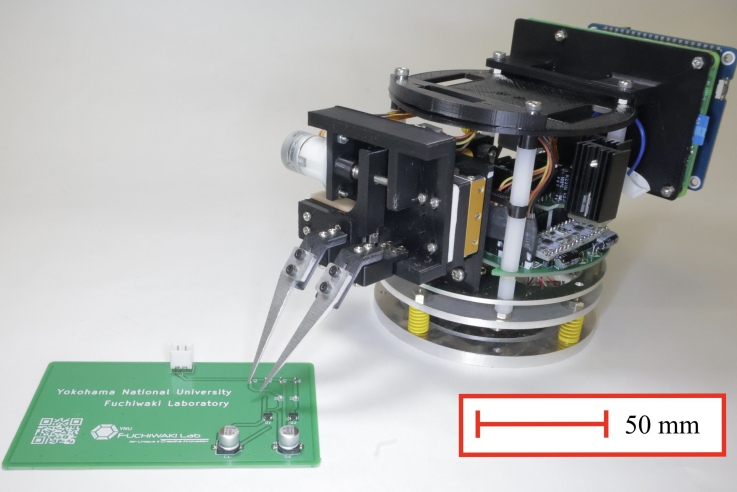
(图片来源:横滨国立大学)
HB-3旨在满足实验室自动化、医疗程序和科研等领域日益增长的需求,在多尺度上进行精准操控,从纳米材料、细胞操控到芯片组件组装,这些操作在人类无法或难以进入的环境中进行。在真空、洁净、通风和生物危害安全室中实现此类操控尤为必要。相关论文发表在期刊《先进智能系统(Advanced Intelligent Systems)》上,其中描述了该机器人的设计和功能。
近年来,自主(无线)机器人已在各领域得到实际应用,如工业领域、事故现场、医疗领域,以及人类无法进入的极端环境或密闭空间等。与此同时,各类设备的内部电子组件也在快速向小型化发展,包括开发厚度仅为几微米的微型电池和微型超级电容器。然而,与这些微小的部件相比,传统定位装置仍然显得过于庞大、笨重,在能源和空间效率方面还有很大的改进空间。即使驱动电路和电池已变得很小,它们的性能范围和操作自由度仍然非常有限。
为了解决这些问题,人们开发了各种精密的致动器(基本上是机器人的“肌肉”,将电能、液压能或气动能等能量转换为运动)以改进这些定位装置,其中压电致动器尤其表现出巨大的前景。压电材料在受到机械应力(本质上是推或挤)时会产生电荷,例如石英表中的石英或PZT(锆钛酸铅)等合成陶瓷。它们还会执行相反的操作,在施加电场时发生变形。借助这种压电特性,它们可以响应非常精确定义的电信号(通常为纳米级)而发生膨胀或收缩,从而实现超精细的运动。然而,虽然人们已经开发出许多微型机器人和夹持器,但目前还没有哪种移动微操作器既可以集成压电驱动技术,又能实现自主性、不受束缚且适应实际应用。
HB-3的设计核心在于其紧凑、轻量化的结构,仅重515 g,体积仅为10 cm³。其中集成驱动电路使用单板计算机,从而消除了该团队在先前研究中由电源线引起的问题。HB-3还配备了内置摄像头,并使用机器学习算法执行任务,因而能够实时调整其动作,这是以前的微操作器所没有的功能。
在严格的测试过程中,HB-3在密闭、隔离的环境中执行各种任务时表现出色,它们可以使用不同的工具,例如用于拾取和放置芯片部件的精密镊子,或用于施加微小液滴的注射器,同时在x轴上的平均定位精度仅为0.08 mm,在y轴上仅为0.16 mm,其中87%的任务被视为获得了成功。这些工具可以根据需要灵活地转换为测量探针、烙铁、螺丝刀和其他精密仪器,并且可在从米到纳米等多尺度上进行操作。
横滨国立大学工程学院副教授Ohmi Fuchiwaki表示:“我们已经有能力突破小型化的界限,创造一种真正自主、不受束缚的设备,它可以在狭小、危险的空间中运行。HB-3不仅可以处理复杂的任务,而且可以实现无与伦比的精度。”
尽管如此,该团队仍希望对这种“小甲虫”设备进行微调。他们认为,HB-3的处理速度(依赖于Raspberry Pi CPU)可以提升,并且该机器人检测物体所需的时间可以减少,或许这可以通过将物体检测转移到外部高性能计算机上来实现。展望未来,研究人员还希望提高其速度和精度,并致力于集成内部侧视和顶视摄像头,以提高z轴定位的精度。
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- 横滨国立大学开发微型“犀牛甲虫”机器人 可在极端条件下进行微尺度操作2025-03-12
- 江波龙汽车存储全矩阵亮相MemoryS 2025 展现自研自控实力2025-03-12
- 2025款别克昂科威S白金版发布 3月18日上市2025-03-12
- 美国研究人员开发仿生机械臂 利用人造肌肉来抑制震颤症状2025-03-12
- 高阶智驾普惠化提速 | 零跑汽车智能驾驶布局2025-03-12
- 特斯拉FSD系统部署计划在英国遇阻2025-03-12
- 莲花人事调整,“铁娘子”毛京波的得与失2025-03-12
- 智界R7上市5个多月累计大定突破8万台2025-03-12
- FF任命陈文胜负责工厂运营和质量管理,推动FX大规模量产准备2025-03-12
- 人形机器人第一关:攻克数据难题2025-03-12