德国研究人员利用藻类和磁性材料开发微型机器人 以穿过狭小空间
据外媒报道,德国马克斯·普朗克智能系统研究所(MPI-IS)研究人员开发出生物混合微型游泳器,该游泳器的表面覆有磁性材料,但其游泳能力基本不受涂层影响。
(图片来源:MPI-IS)
在自然界中,这些只有十微米大小的单细胞微藻是出色的游泳者,靠着前端的两根鞭状鞭毛向前游动。然而,如果在藻类上覆盖一层薄薄的天然聚合物壳聚糖(为了获得良好的粘附性),并在壳聚糖中混合磁性纳米颗粒,结果会如何呢?这种微小的游泳者是否仍能穿过狭窄的空间,更具挑战性的话,它们能否穿过密度与动植物粘液相似的粘稠液体?
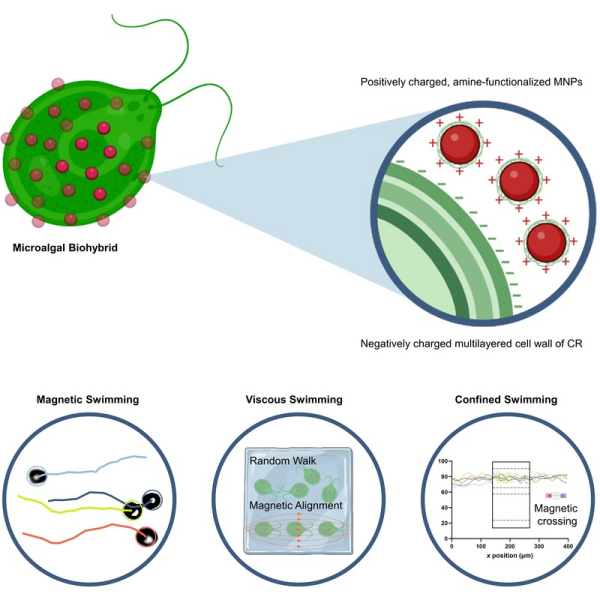
(图片来源:MPI-IS)
研究人员发现,这些基于绿色藻类的微型游泳器几乎不受额外负荷的影响。这些藻类利用其鞭毛进行蛙泳运动,像一颗飞速的子弹一样向前弹射。尽管覆有涂层,它们在磁化后仍能保持游泳速度,平均为每秒115微米(相当于大约每秒12个身体长度)。相比之下,像Michael Phelps这样的奥运游泳运动员可达到每秒1.4个身体长度的速度。值得注意的是,这些藻类只是没有腿和脚的单细胞。
这项研究的共同负责人Birgül Akolpoglu和Saadet Fatma Baltaci是MPI-IS物理智能部门的研究人员。几年前,他们研究了如何在流体空间中对细菌基微型游泳器进行磁控制,以用于药物输送。现在他们把注意力转向了微藻,旨在用磁性材料对单细胞生物的表面进行功能化,以便它们可以朝各个所需方向移动,从而将微藻变成微型机器人。
对细胞进行涂覆仅需几分钟,最终90%的藻类成功被磁性纳米颗粒覆盖。在测试过程中,该团队首先使生物混合机器人在像水一样稀薄的液体中游泳。利用外部磁场,他们能够控制微藻游动的方向。然后,研究人员沿着微型3D打印圆柱体操纵机器人,这创造了一个高度受限的环境,其中最大的尺寸仅为微藻的三倍。为了观察机器人能否成功转向,该团队设置了两个不同的系统:其中一个带有磁线圈,另一系统的显微镜周围带有永磁体。这创造了一个均匀的磁场并反复改变其方向。
Birgül Akolpoglu在谈到这项概念验证研究时表示:“我们发现,微藻生物混合体以三种方式在3D打印微通道中导航,分别是回溯、穿越和磁穿越。没有磁导航,这些藻类经常会卡住并回溯到起点。但有了磁控制,它们移动得更加平稳,可以避开边界。磁导航有助于生物混合体与磁场方向保持一致,真正具有在密闭空间中导航的潜力,就像给它们安装一个微型GPS一样。”
接下来,该团队增加了流体的粘度,并再次将微型机器人送入狭窄的通道。Baltaci表示:“我们想测试这些游泳机器人在类似粘液的物质中的表现。结果发现粘度会影响微藻生物混合物的游泳方式。较高的粘度会使它们速度放缓,并改变它们向前游动的方式。当施加磁场时,这些游泳机器人会振荡,以Z字形向前移动。这强调了如何微调粘度和磁性对准,以优化微型机器人在复杂环境中的导航。”
该团队表示:“我们的愿景是将微型机器人应用于复杂、狭小且高度受限的环境中,例如人体组织中的环境。这项研究成果为靶向药物输送等应用打开了大门,提供了一种生物相容性医疗解决方案。这为生物医学及其他领域的未来创新带来了巨大的潜力。”
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- 一天一个西红柿几天就能白 西红柿一天一个什么好处2024-04-26
- 流脑是什么病表现和症状有哪些 流脑疫苗打自费还是免费的?2024-04-26
- 体检发现尿酸高怎么办 需要服药吗为什么?2024-04-26
- 脊柱侧弯是怎么形成的原因是啥 脊柱侧弯正骨能矫正过来吗?2024-04-26
- 脓毒血症是什么病 脓毒血症是怎么引起的一般多久治好?2024-04-26
- 生物胺类物质包括什么 生物胺对人体的影响有哪些2024-04-26
- 手脚血管堵塞最佳治疗方法 感觉手脚血管有点堵塞怎么回事2024-04-26
- 夜尿多就是肾有问题么 夜尿多是肾虚还是前列腺炎?2024-04-26
- 脓毒血症症状表现有哪些 脓毒血症最怕三个征兆2024-04-26
- 淫秽物品认定标准是什么 传播淫秽物品牟利罪如何判定?2024-04-26