清华大学研发自动驾驶舒适度预测模型 将路径规划与驾乘舒适度结合
在自动驾驶汽车快速发展的背景下,乘客的舒适体验已经成为影响其接受程度和成功与否的关键因素。尽管此类汽车在安全性和运行效率方面已取得重大进展,但对舒适性这一要素却常常被忽视。据外媒报道,中国清华大学(Tsinghua University)的一项研究发明创新方法,通过基于道路信息和先进机器学习技术来预测驾驶舒适度。
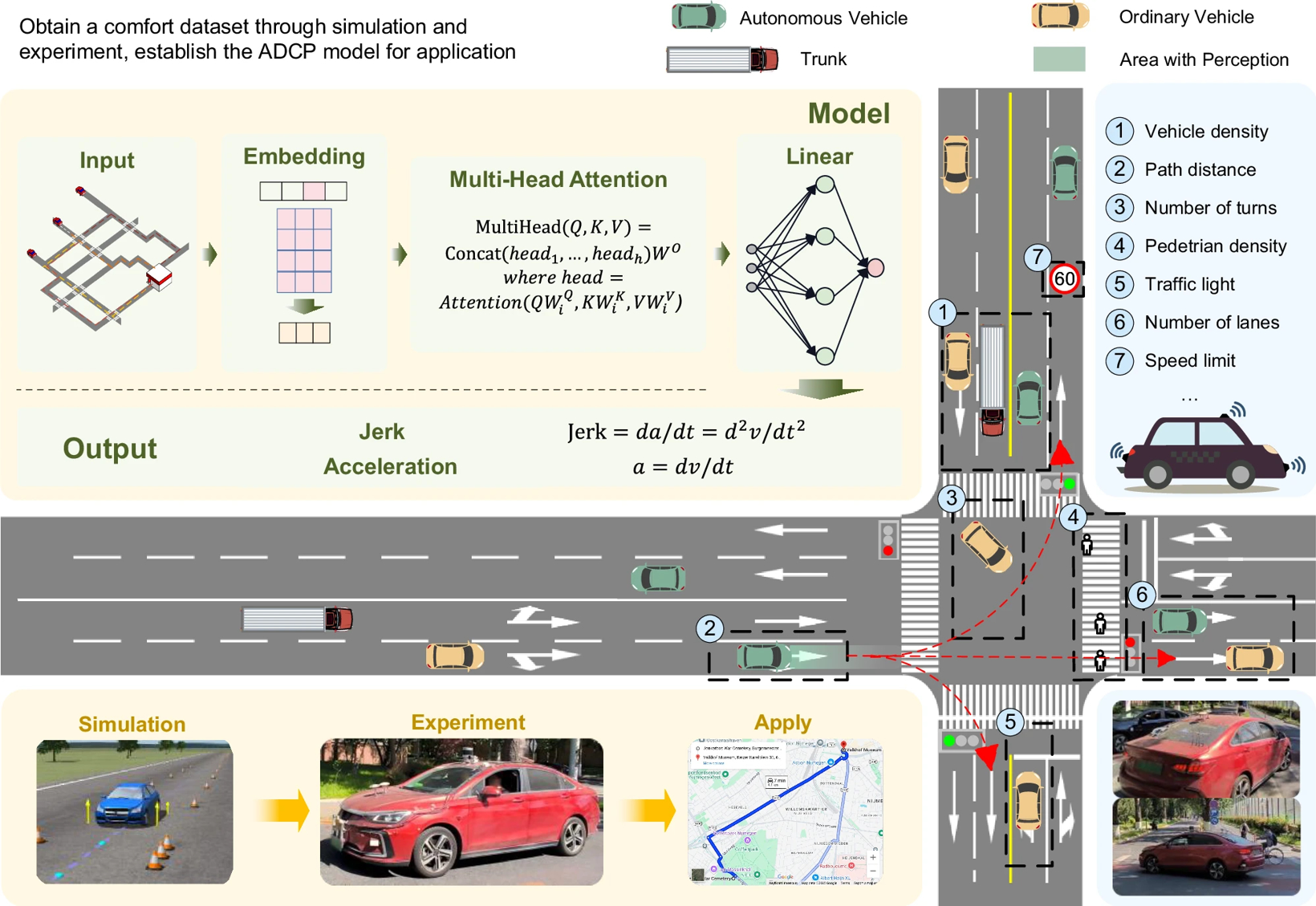
自动驾驶舒适度预测模型(图片来源:清华大学)
自动驾驶汽车有望减少交通事故并改善交通管理,但确保舒适的驾乘体验是其能够被接受的基础。该项研究旨在构建一个框架,将驾驶舒适度集成至控制车辆轨迹的路径规划算法中。将有关道路状况和交通流量的见解集成至该框架,是打造更顺畅、更舒适驾乘体验的关键。
研究人员们研发了一个综合数据集,其中结合了道路信息与舒适度指标(如加速和急刹),此类指标对于评估行驶平稳性至关重要。该数据集通过从真实车辆和模拟试验中收集数据而打造,涵盖了从城市道路到高速公路等各种驾驶环境。研究人员表示:“按照该模型优化的路径行驶,车辆的急刹次数有所降低。”
自动驾驶汽车的路径规划可分为全局规划与局部规划。全局路径规划通常可基于距离和时间,确定车辆的行驶路线,而局部规划更侧重于即时感知周围环境以调整驾驶行为。传统上而言,在全局路径规划中,舒适度一直是次要考虑因素,而且大多数研究优先考虑安全性和效率。不过,该项研究认为,交通信号灯密度、道路类型以及环境条件等因素会显著影响驾驶舒适度。
研究人员们采用了多头注意力机制和XGBoos算法,研发了自动驾驶舒适度预测(Autonomous Driving Comfort Prediction,ADCP)模型。该方法让该模型能够利用多种影响舒适度的因素之间复杂的交互关系,同时高效地预测车辆的动态表现。该研究的结果表明,采用ADCP模型的车辆的横向急刹次数显著降低,而横向急刹是衡量舒适度的重要指标。该研究团队报告称,在车辆测试期间,平均急刹次数减少了约15%,实现了更为舒适的驾乘体验。
此外,测试对象的主观评价显示,总体舒适度得分提升了约13%,进一步验证了此种新型路径规划方法的有效性。
将此类预测性舒适度模型集成至导航系统中,对自动驾驶技术的未来发展也具有重要意义。随着此类车辆的不断发展,提供舒适的驾乘体验将与增强安全功能一样重要。这一点尤为关键,因为在自动驾驶车辆相关法规日益严格的情况下,制造商需要将乘客关怀作为优先考虑的因素之一。
此外,该项研究为该领域的未来研究提供了重要参考。通过推进舒适度预测,研究人员们希望为研发更精细的算法铺平道路,以更好地满足个体乘客的偏好,满足更广泛的社会需求。
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- 一天一个西红柿几天就能白 西红柿一天一个什么好处2024-04-26
- 流脑是什么病表现和症状有哪些 流脑疫苗打自费还是免费的?2024-04-26
- 体检发现尿酸高怎么办 需要服药吗为什么?2024-04-26
- 脊柱侧弯是怎么形成的原因是啥 脊柱侧弯正骨能矫正过来吗?2024-04-26
- 脓毒血症是什么病 脓毒血症是怎么引起的一般多久治好?2024-04-26
- 生物胺类物质包括什么 生物胺对人体的影响有哪些2024-04-26
- 手脚血管堵塞最佳治疗方法 感觉手脚血管有点堵塞怎么回事2024-04-26
- 夜尿多就是肾有问题么 夜尿多是肾虚还是前列腺炎?2024-04-26
- 脓毒血症症状表现有哪些 脓毒血症最怕三个征兆2024-04-26
- 淫秽物品认定标准是什么 传播淫秽物品牟利罪如何判定?2024-04-26