国内首个太空采矿机器人来了 看"星际矿工"如何采矿

随着地球资源的日益枯竭,人类的目光逐渐投向了太空,尤其是蕴藏丰富矿产资源的月球、火星、近地小行星等。太空采矿,这个以往在科幻小说和电影中出现的场景,正在逐步走向现实。
前不久,我国首台太空采矿机器人在中国矿业大学诞生。一起去看看未来的“星际矿工”是什么样?
中国矿业大学刘新华教授团队研发的多功能太空采矿机器人,与时下火爆的人形机器人以及机器狗等不同,太空采矿机器人的基本形态为六足模式,有三个轮足和三个爪足。刘新华教授告诉记者,之所以这样设计,主要是为了适应太空中的微重力环境。
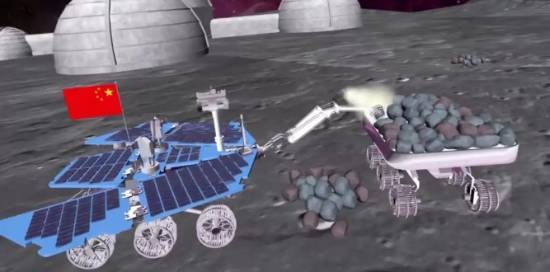
太空采矿机器人要在地外星体上完成地质勘探和矿物采集任务,钻探属于必备技能。在地球重力环境下,机器人本身的重量就足以支撑钻头钻进,而月球重力只有地球的六分之一,小行星上大多是低微重力,如何让钻头顺利钻进星体表面就成了大问题。
为了解决失重带来的漂移,科研团队想到了模拟昆虫的爪刺结构,于是,为太空采矿机器人设计了特殊的爪刺足。这属于一个阵列式的爪刺,微重力环境下,它的附着能力更强,抓地能力更强。在微重力环境下能够让它固定住进行采样,还能够根据地形进行移动。

不仅能适应太空的微重力环境,“采用仿生六足移动结构”,机器人足末端有车轮和锚固结构两种配置,也让它可以在小行星坑洼不平的地面上行走。目前,太空采矿机器人原型机已经向有关部门申请专利,并且通过了初审。
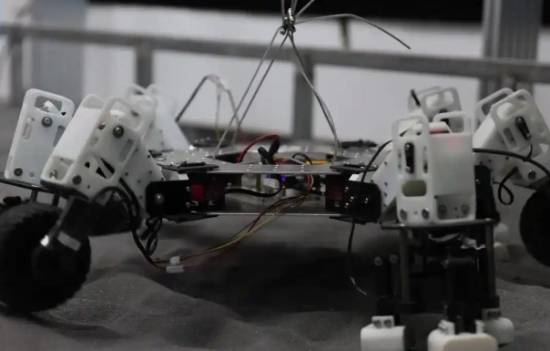
太空采矿机器人要在太空星体上完成探矿采矿工作,不仅要面对微重力的问题,还要面对极端温差、真空、太空辐射以及重量体积限制等一系列难题。如何让机器人练就“十八般武艺”?刘新华教授团队给太空采矿机器人搭建了一个特殊的“训练场”。
团队成员介绍,经过在沙盘上不断训练,目前,通过六足差动系统悬架、离合器等协同工作,太空采矿机器人已经可以根据工作环境调整自身结构形状,适应地外星体的复杂地表环境。
开发太空资源不仅是科技竞争的制高点,更承载着未来人类文明可持续发展的希望。专家介绍,基于现有的空间科学技术、航空航天技术以及采矿技术等,人类有望在几十年内实现试验性开采近地星体上的太空资源。
专家介绍,在有限的地球资源最终将面临枯竭困境的威胁下,人类走向太空是必然选择。月球作为地球唯一的天然卫星,同时具有距地球相对较近的优势和丰富的资源,目前对月球资源的探索研究全球关注度最高,科研投入也最大。
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- 谢孟伟称拍小兵张嘎一分钱没要 没改变家里经济情况2024-07-05
- 老麦克模拟器:模拟游戏《凶案现场清洁工》8.14发售2024-08-04
- 金铲铲之战香水宝石悠米要怎么肝2024-08-12
- 黑神话悟空三冬虫全地图收集位置2024-08-22
- 星球重启拳王小熊属性介绍2024-08-22
- IGN中国分享:《黑神话》"小西天"全Boss战演示2024-08-27
- SE修复《最终幻想16》PC试玩版 体验大幅提升2024-08-27
- 游民星空专访BLG中单Knight:“我《黑神话》刚到第二章”2024-08-31
- 晨报|曝NS2将有双屏体验 R星欲为GTA6低价买断歌曲2024-09-08
- 郭帆谈年轻人躺平:看不到奋斗的路径和结果2024-09-15