利用神经网络模型 科尔多瓦大学改善低光照条件下的机器视觉和物体检测
在设计机器人时,例如波士顿动力公司(Boston Dynamics)的拟人机器人Atlas锻炼和分类箱子时,基准标记可帮助它们移动、检测物体并确定其准确位置的指南。它是一种用于估计物体位置的机器视觉工具。乍一看,这种基准标记是扁平的、高对比度的黑白方形代码,大致类似于二维码标记系统,但其优势是可以在更远的距离被检测到。
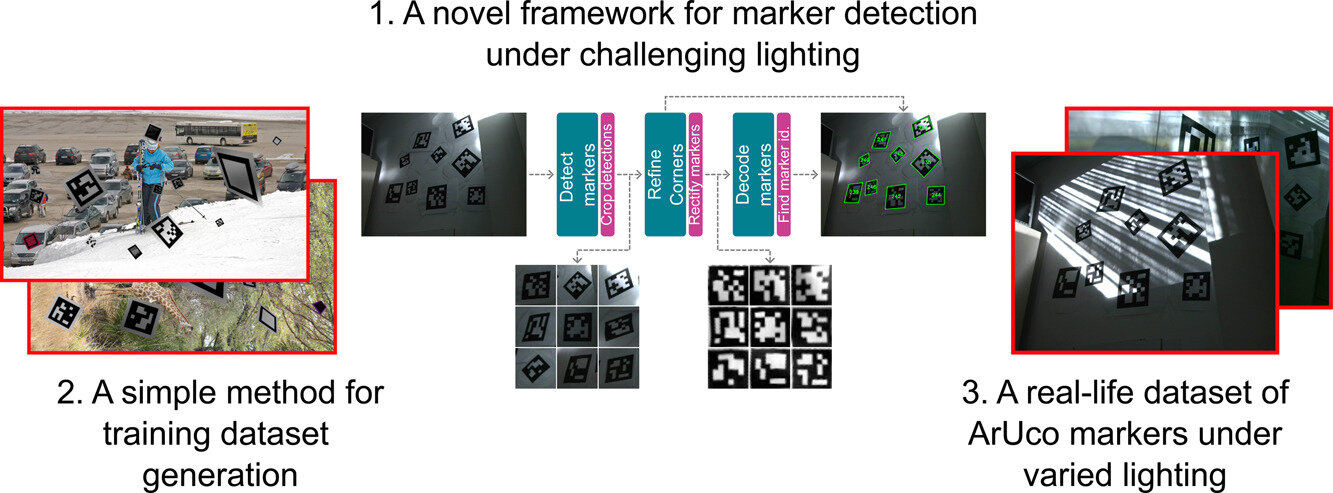
图片来源:期刊《Image and Vision Computing》
在物流方面,屋顶上的摄像头可以使用这些标记自动识别包裹的位置,从而节省时间和成本。到目前为止,该系统的弱点是照明条件,因为经典的机器视觉技术无法准确定位和解码标记,因此在低光照条件下无法发挥作用。
据外媒报道,为了解决这个问题,科尔多瓦大学(University of Cordoba)机器视觉应用研究小组的研究人员Rafael Berral、Rafael Muñoz、Rafael Medina和Manuel J. Marín开发出新系统,首次能够使用神经网络在困难的照明条件下检测和解码基准标记。该论文发表在期刊《Image and Vision Computing》上。
“在模型中使用神经网络使我们能够以更灵活的方式检测这种类型的标记,解决了检测和解码过程所有阶段的照明问题,”研究员Berral解释说。整个过程由三个步骤组成:标记检测、角点细化和标记解码,每个步骤都基于不同的神经网络。
这是第一次对该问题给出完整的解决方案,正如Manuel J. Marín指出的那样,“曾经有很多尝试,例如在最佳照明条件下提高速度,但是低照明或许多阴影的问题尚未得到完全解决,因此无法改善流程。”
如何训练机器视觉模型
在训练这个提供端到端解决方案的模型时,团队创建了一个合成数据集,该数据集可靠地反映了在没有理想条件的情况下使用标记系统时可能遇到的照明情况类型。研究人员表示,经过训练后,“该模型将使用真实数据进行测试,其中一些数据是内部生成的,另一些数据是其他先前作品的参考。”
用于训练模型的人工生成的数据以及现实世界中不利照明条件下的数据都是公开可用的。因此,该系统现在可以应用,“因为代码已经发布,并且可以使用任何出现基准标记的图像来测试代码,”Rafael Muñoz回忆道。
得益于这项工作,机器视觉应用已经克服了一个新的障碍:在黑暗中移动。
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- 利用神经网络模型 科尔多瓦大学改善低光照条件下的机器视觉和物体检测2025-01-27
- 住友电工:特朗普对墨西哥征税或使企业将生产转移到东南亚2025-01-27
- 韩国研究人员开发2升氨燃料发动机 具有更高的热效率和功率输出2025-01-27
- 某合资工厂再遭流拍2025-01-27
- viveEV公司推出600kW和180kW直流快速充电器2025-01-27
- 或6月上市 小米YU7实车图再次曝光2025-01-27
- 预售8.98万起 海豹05DM-i将于一季度内上市2025-01-27
- 特斯拉新款Model Y现已到店 3月开启交付2025-01-27
- 搭载四电动机 仰望U7将于一季度内上市2025-01-27
- 黑化风格 宝马5系曜夜套装将于5月上市2025-01-27