Hugging Face扩展LeRobot平台数据集 为自动驾驶机器训练赋能
去年,人工智能(AI)技术开发平台Hugging Face推出了LeRobot,一套开放式人工智能(AI)模型、数据集和工具,旨在帮助打造现实世界的机器人系统。据外媒报道,当地时间3月11日,Hugging Face与AI初创公司Yaak合作,为LeRobot扩展了训练集,旨在训练能够在诸如城市街道等环境中自主导航的机器人和车辆。
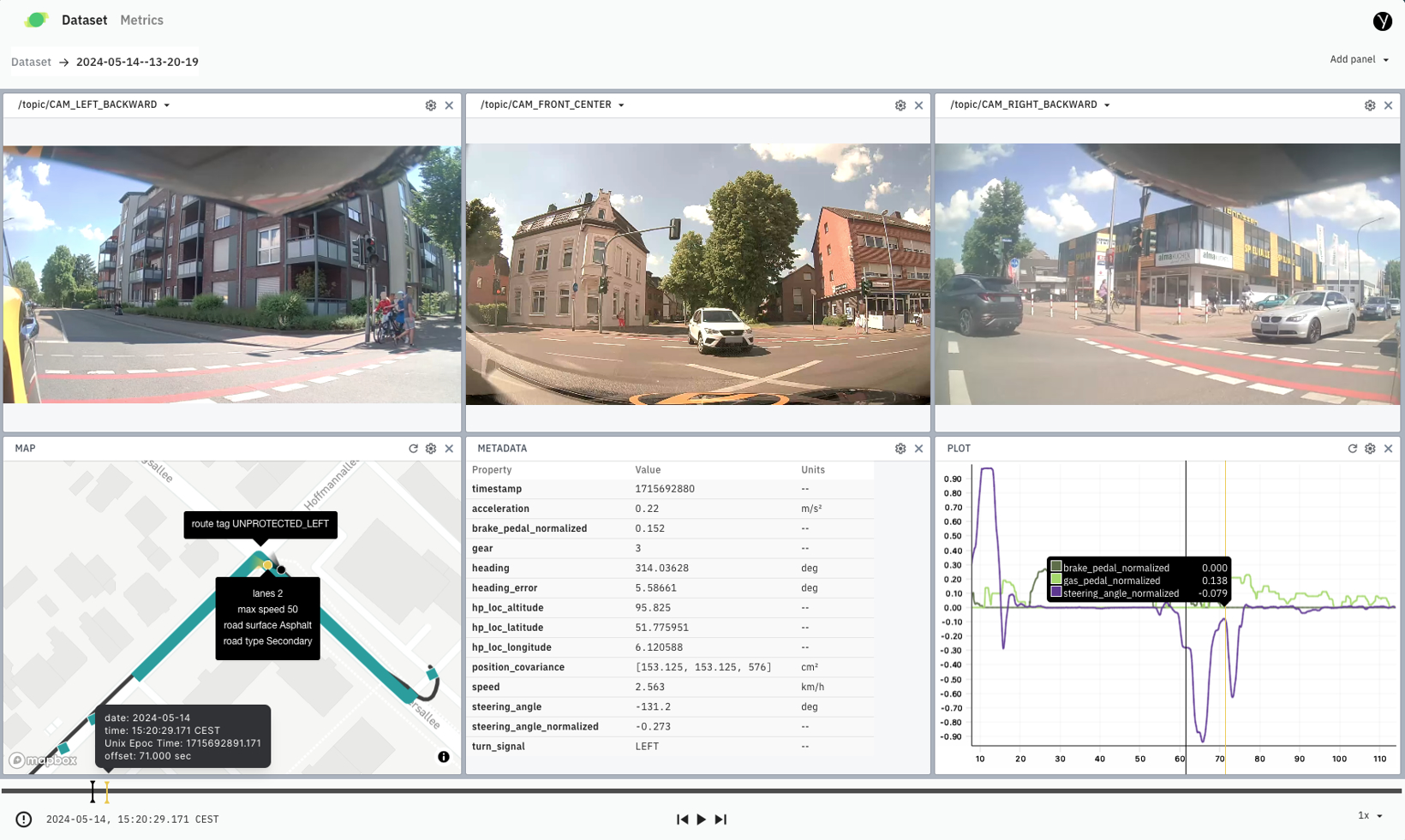
多模态数据可视化(图片来源:Hugging Face)
新数据集命名为Learning to Drive(L2D),大小超过1PB,包含安装在德国驾校汽车上的传感器收集的数据。L2D捕捉了驾驶教练与学员在施工区域、交叉路口、高速公路等道路环境下的摄像头、GPS和“车辆动态”数据。作为全球最大的多模态数据集,L2D旨在为汽车行业打造开源空间智能系统,为Hugging Face的LeRobot训练管道和模型提供一流的支持。
受源代码版本控制最佳实践的启发,Yaak还邀请了AI社区成员对整个数据集(>1PB)进行探索,并识别新片段。此类新片段合集经过排队审核,将会集成至未来的版本(R5 )中。
L2D数据集是在为期三年的时间内,通过在德国30个城市的驾校中部署于60辆电动汽车上的统一传感器套件收集而来,其中的策略被分为两类:由教练执行的专家策略以及由学员执行的学生策略。两类策略都包含与驾驶任务有关的自然语言指导,专家策略因不存在驾驶错误,被认为是最佳策略,而学生策略被认为为次优。两组策略都全面涵盖了在欧盟(德国版)获取驾照所需完成的所有驾驶情境,包括但不限于超车、环形交叉路口以及铁路道口驾驶等。
目前,市场上已有多个开放的自动驾驶训练数据集,包括Alphabet的Waymo和Comma AI。但是,据L2D数据集的创建者所说,许多数据集都关注于物体探测和跟踪等规划任务,此类任务通常都需要高质量的标注,因而很难得到扩展。相比之下,L2D数据集旨在支持端到端学习的开发,通过传感器的输入信息(如摄像头捕捉的画面),直接学习预测动作(如行人可能要穿过街道)。
Hugging Face和Yaak计划于2025年夏天利用L2D数据集和LeRobot开展现实世界“闭环”模型测试,测试车辆将配备安全驾驶员。两家公司呼吁AI社区成员提交希望对模型进行评估的模型和任务信息,例如绕环岛行驶和在泊车位附近行驶等场景。
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- Hugging Face扩展LeRobot平台数据集 为自动驾驶机器训练赋能2025-03-17
- 极星汽车将降低线上销售依赖,依托沃尔沃经销商网络重寻增长路径2025-03-17
- 戴姆勒卡车在欧洲启动十亿欧元的降本计划2025-03-17
- 日本出光兴产将建硫化锂工厂,助力丰田电动汽车计划2025-03-17
- 受辅助驾驶技术需求推动,英伟达2024年汽车业务营收创历史新高2025-03-17
- 东芝推出用于汽车有刷直流电机的栅极驱动器IC 有助于设备小型化2025-03-17
- 佛瑞亚预计2025年销售额将与2024年大致持平2025-03-17
- BOS Semiconductors与欧洲OEM合作开发SoC2025-03-17
- 福特申请新专利 未来或将配备可拆卸和可停靠的显示屏2025-03-17
- Cerence AI推出基于LLM的混合平台xUI 助力全面提升车载体验2025-03-17