欧洲大学打造四足机器人 能够模仿狗的步态
据外媒报道,荷兰代尔夫特理工大学(TU Delft)与瑞士洛桑联邦理工学院(EPFL)的研究人员研发了无需电机的四足机器人,可以模仿狗的奔跑动作。研究人员利用机器学习技术分析犬类的动作,并设计出一套弹簧、缆绳及串联系统,让该机器人能够在跑步机上行走,并能适应速度的变化。电机仅用于攀爬或避障等任务,而且使用量被降至最低。研究人员表示:“通过提升机械与认知能力,我们旨在研发出更高效且能高度适应复杂环境的四足机器人。”
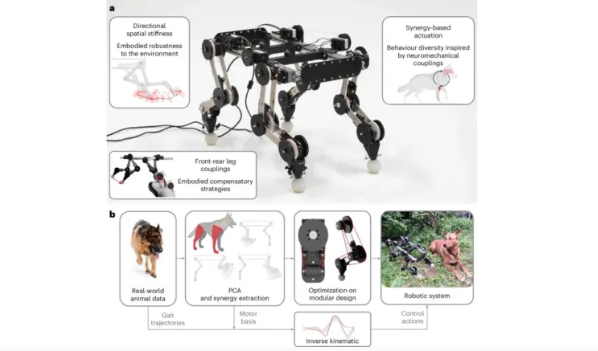
四足机器人(图片来源:代尔夫特理工大学)
仿生机器人的移动性
四足动物凭借特殊的形态结构、弹性肌腱以及生物力学特性,能够在各种复杂地形中高效移动。尽管四足机器人通常需要依赖刚性组件和复杂的控制系统,但其试图模仿此类能力以用于探索和搜索救援等任务。尽管其适应性受限,但此类被动行走者可通过结构与环境的互动实现节能运动。
当前的仿生机器人采用顺应性驱动设计来模仿动物的动作。例如,以蜻蜓幼虫为灵感的抛射运动、基于鸵鸟特性的离合器装置以及以猫为基础的跳跃式腿脚。目前,研究人员正在研究协同作用,即让控制变得更为简单的协同运动模式。此种模式可以减少人形平衡系统和机械手对传感器和执行器的需求。
该研究团队展示了一款称作具有协同作用的被动自动机(Passive Automata with Synergies,PAWS)的四足机器人,可通过四个电机以协同方式操作其十二个自由度。此类电机结合基于协同作用的执行器以及最佳物理顺应性,可执行四种运动协同作用,而此种协同作用的灵感都来自于犬类奔跑时的生物学数据。
PAWS展现了稳健且多样化的被动步态,以及对环境变化所作出的主动、类似动物的反应。此外,通过将逆运动学(IKs)应用于电机协同作用,实现了坐、跳和跑等主动步态。
PAWS通过一条采用生物动作捕捉数据的流水线设计而成,提前基于协同作用的驱动方式,以复制神经机械耦合,从而导致腿部末端执行器具有定向刚度,而且能够根据工作空间而变化,从而改进步态性能。此种协同肌腱布线还促进了肌体耦合,实现适应性补偿行为。凭借其被动顺应性和环境适应性,PAWS代表了一种仿生学方法,用于研发高效且适应性强的四足机器人。
协同作用驱动的四足机器人
PAWS是一款采用电机协同作用和顺应性特点设计的四足机器人,可在最少执行器输入的情况下实现稳健性和多样化的行为。受动物神经机械耦合机制的启发,研究人员采用主成分分析法(PCA)对狗的关节运动进行了分析,以提取能够描述最显著运动模式的协同作用。
通过简化关节运动,该研究团队识别出四种主要的协同作用,能够解释80%的肢体运动变化。基于此种方法,研究人员设计了一款由12个关节组成的肌腱驱动四足机器人,仅通过4个执行器控制,每个执行器对应一种协同作用。
在该款四足机器人的设计过程中,肌腱布线、滑轮直径和关节刚度都得到优化,以模仿生物运动。对狗动作的逆运动学追踪分析证实,基于协同作用的控制系统让PAWS能够展现出逼真、类似动物的步态,包括行走、坐立和奔跑。实验数据表明,该机器人能够沿着生理启发式路径运动,而且其关节角度的变化也完全相同。
此外,PAWS展现出卓越的被动特性。当把其放置在没有电机驱动的跑步机上时,其呈现出类似奔跑的步态,展现出对外部的干扰的强大适应性以及基于速度变化的自适应行为,而且其机械耦合和顺应性互动作用让其具备稳定性,并能抵抗干扰。在受到物理干扰时,PAWS可在单个周期内恢复至稳定步态。
该研究充分展现了基于协同作用的设计可打造高效、灵活且适应性强的机器人。据该研究团队所说,PAWS为仿生运动提供了见解,并展示了降低驱动复杂性的益处,可应用于复杂多变环境中的机器人。
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- 一天一个西红柿几天就能白 西红柿一天一个什么好处2024-04-26
- 流脑是什么病表现和症状有哪些 流脑疫苗打自费还是免费的?2024-04-26
- 体检发现尿酸高怎么办 需要服药吗为什么?2024-04-26
- 脊柱侧弯是怎么形成的原因是啥 脊柱侧弯正骨能矫正过来吗?2024-04-26
- 脓毒血症是什么病 脓毒血症是怎么引起的一般多久治好?2024-04-26
- 生物胺类物质包括什么 生物胺对人体的影响有哪些2024-04-26
- 手脚血管堵塞最佳治疗方法 感觉手脚血管有点堵塞怎么回事2024-04-26
- 夜尿多就是肾有问题么 夜尿多是肾虚还是前列腺炎?2024-04-26
- 脓毒血症症状表现有哪些 脓毒血症最怕三个征兆2024-04-26
- 淫秽物品认定标准是什么 传播淫秽物品牟利罪如何判定?2024-04-26