越南河内工业大学开发自适应控制器 可提高对球形机器人的控制能力
球形机器人(ballbot)是一种独特的机器人,具有极高的机动性,可以朝各个方向移动。显然,要控制这样的机器人设备非常复杂。事实上,球形机器人系统面临着独特的挑战,尤其是在动态和不确定环境中保持平衡和稳定性的问题。传统的比例-积分-微分(PID)控制器难以应对这些挑战,而滑动模式控制等其他先进方法也会带来颤振等问题。因此,要控制此类机器人,就需要开发一种控制器,将PID的简单性和适应性与如今流行的神经网络的学习能力结合起来,为现实世界中的机器人移动问题提供鲁棒性的解决方案。
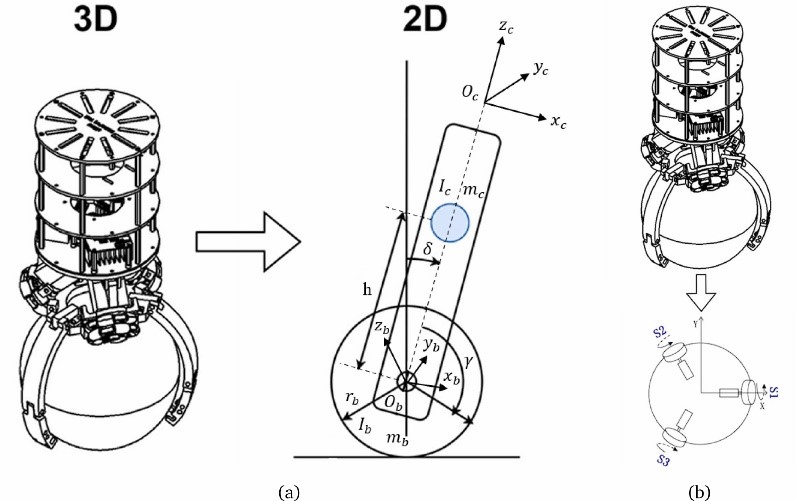
图片来源:《Engineering Science and Technology, an International Journal》
据外媒报道,越南河内工业大学(Hanoi University of Industry, Vietnam)Van-Truong Nguyen博士领导的研究团队提出了一种新的鲁棒性自适应控制解决方案。相关研究成果发表在期刊《Engineering Science and Technology, an International Journal》上。
该研究为球形机器人引入一种集成了径向基函数神经网络(RBFNN)的新型自适应非线性PID(NPID)控制器,具有计算量轻、稳定性高、颤振减少和抗外部干扰能力强等特点。该控制器的初始设置是通过平衡复合运动优化选择的,并在运行过程中不断改进自适应控制规律,以实时估计外部力。
在本研究中,Van-Truong Nguyen博士的研究团队通过应用Lyapunov理论强调了系统的稳定性。通过模拟和实际实验,研究人员展示了NPID-RBFNN控制器的有效性,表明其优于传统PID和NPID控制器。此外,该研究所提出的控制器还能通过自学习和自调整功能适应表面变化。
Nguyen博士对这项创新技术提出了多种应用设想,包括辅助机器人、服务机器人和自动化配送。他在阐述这些领域时表示:“配备这种先进控制器的球形机器人可以作为辅助机器人,执行需要高机动性和精确度的任务。例如,它们可以帮助行动不便的人在复杂环境中导航。此外,它们还可以作为服务机器人在餐厅、医院或机场等动态环境中提供平稳的导航。强大的自平衡能力还可以应用于自动配送机器人,这些机器人需要在风力或不平坦的地形等不可预测的外部力量下高效运行。”
值得注意的是,这项研究解决了控制球形机器人在非线性和动态环境中的重大挑战,重点关注其可靠性,以便在需要自主移动解决方案的行业中得到更广泛的采用。通过减少不必要的运动和颤动,该研究提出的控制器可以优化能量消耗,促进可持续机器人技术的发展。这反过来又增强了球形机器人的可靠性,使其在公共和私人空间的使用更安全、更可行。
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
如有疑问请发送邮件至:goldenhorseconnect@gmail.com
- 越南河内工业大学开发自适应控制器 可提高对球形机器人的控制能力2025-02-24
- 日本研究人员开发出生物混合无人机 可利用蚕蛾触角通过气味导航2025-02-24
- 韩国仁川国立大学开发新技术改进无线充电 可通过动态频率适应提高效率2025-02-24
- 华为、理想放大招,福特、大众已杀入,谁是混动赛道搅局者?2025-02-24
- 【盖世快讯】北京奔驰高管怒怼恶意竞争;曝理想智驾将全系标配激光雷达2025-02-24
- 特斯拉因动力转向辅助功能故障在美国召回37.6万辆汽车2025-02-24
- 达契亚将推出新款欧洲产纯电动微型车,定价1.8万欧元2025-02-24
- 雷诺高管确信欧盟将放宽碳排放规定2025-02-24
- 中高阶智驾出海,全球Tier 1博世“剪断”阻拦索2025-02-24
- Rivian因前照灯故障在美国召回17,260辆汽车2025-02-24